In this lesson we will demonstrate how to send IR codes to a TV, DVD, DVR/cable box or any other device that uses an infrared remote. You will need…
- a 38 kHz IR receiver module,
- an IR LED and driver circuit such as described in part 1 of this tutorial,
- a TV, DVD, DVR or whatever device to control,
- an IR remote control for that device so we can obtain the proper codes.
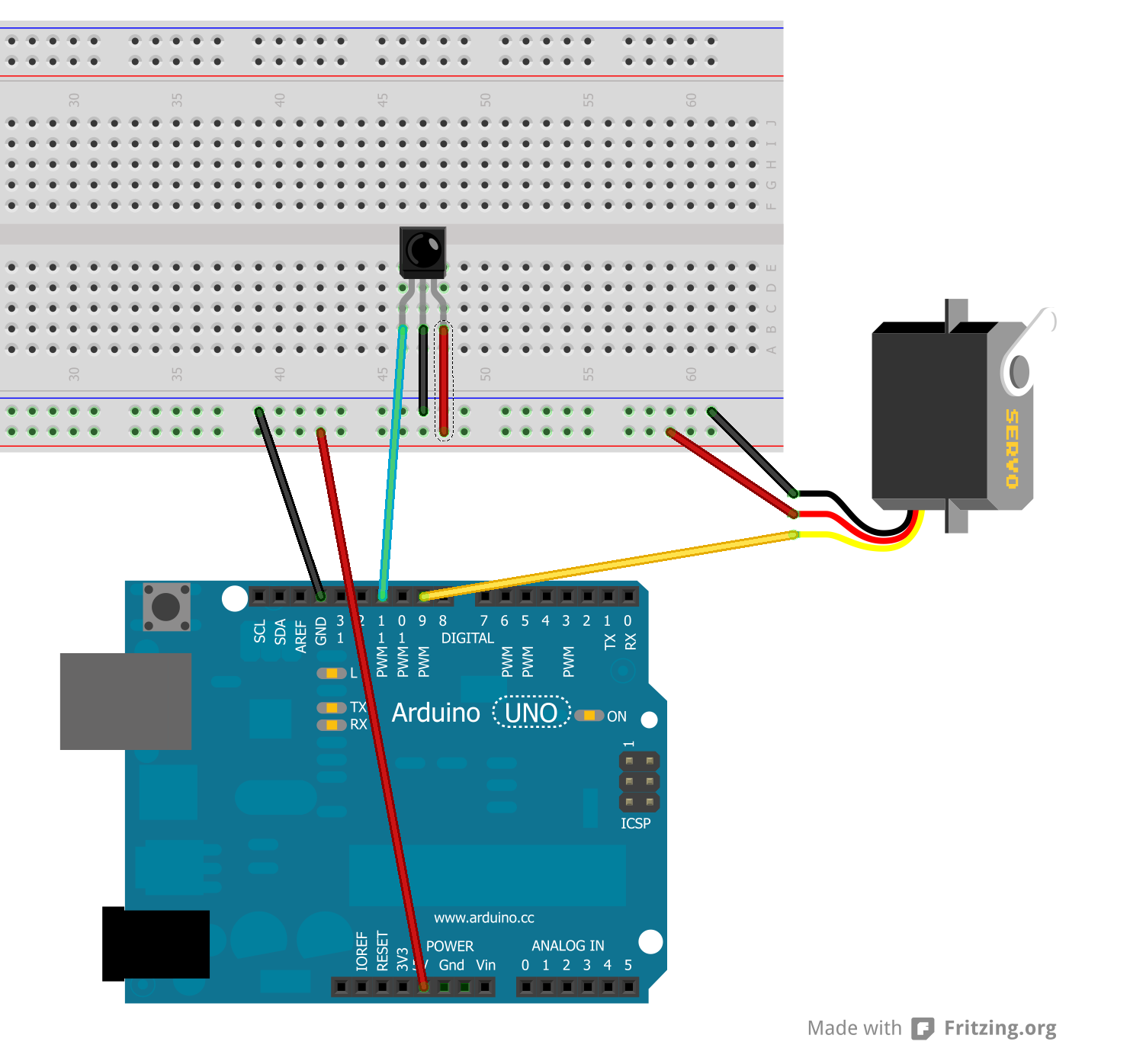
Begin the process by wiring an IR receiver to pin number 11 on your Arduino as described in part 1 of this tutorial. Hook up an IR LED and a driver circuit also described in part 1 of this tutorial. If you are using Arduino Uno it will connect to pin 3. On the Arduino Leonardo you should use pin 9
Now you should load the IRrecvDump sketch from the examples folder of the IRLib library. We will use this sketch to determine what codes your infrared remote is transmitting. Run the sketch and open the serial monitor. This is the same process described in part 2 of this tutorial. Write down the received codes for all of the major functions of your device such as power on, channel up and down, volume up and down, rewind, fast-forward, play, stop etc. Also make note of the protocol and the number of bits. Here is what the dump for the power on function looks like on my Magnavox TV
Decoded RC5: Value:180C (13 bits)
Raw samples(24): Gap:30014
Head: m850 s900
0:m900 s900 1:m1700 s900 2:m900 s900 3:m850 s900
4:m850 s900 5:m850 s900 6:m900 s850 7:m900 s1750
8:m900 s850 9:m1750 s900 10:m900
Mark min:850 max:1750
Space min:850 max:1750
As before, you only need to concern yourself with the first line of text. The protocol is “RC5” the code is “180C” and it uses 13 bits.
We are going to presume that you are using a remote that has a protocol that this library understands. If the top line of the dump says “Decoded Unknown” then you will have to skip ahead to section on how to program your own protocol in a future lesson of this tutorial.
Now load the following sketch named “IR_serial_remote” which is shown here. It is also available in the latest update to IRLib version 1.1 which was uploaded to GitHub on April 21, 2013 or later. This upgrade to the library also contains some other minor enhancements and a copy of the “IRservo” example used in part 2 of this tutorial.
#include
IRsend My_Sender;
int protocol;
long code;
int bits;
void setup() {
Serial.begin(9600);
}
long parseHex (void) {
long Value=0; char C;delay(100);
while (Serial.available()>0) {
C= tolower(Serial.read());
if ((C>='0')&&(C<='9'))
C=C-'0';
else
if ((C>='a') && (C<='f'))
C=C-'a'+10;
else
return Value;
Value= C+(Value<<4);
};
return Value;
}
void parseDelimiter () {
char C;
while(Serial.available()>0) {
C=tolower(Serial.peek());
if( (C>='0') && (C<='9') )return;
if( (C>='a') && (C<='f') )return;
C=Serial.read();//throwaway delimiters
delay (5);
}
}
// enum IRTYPES {UNKNOWN, NEC, SONY, RC5, RC6, PANASONIC_OLD, JVC, NECX, HASH_CODE, LAST_PROTOCOL=HASH_CODE};
void loop() {
if (Serial.available ()>0) {
protocol = Serial.parseInt (); parseDelimiter();
code = parseHex (); parseDelimiter();
bits = Serial.parseInt (); parseDelimiter();
/* Serial.print("Prot:"); Serial.print(protocol);
Serial.print(" Code:"); Serial.print(code,HEX);
Serial.print(" Bits:"); Serial.println(bits);
*/
My_Sender.send(IRTYPES(protocol), code, bits);
}
}
Upload the sketch and open the serial monitor. We will type in the protocol number, function code, and the number of bits for one of the functions that you wrote down. For example to turn on my TV I would type in
3,180c,13
The “3” is the number of the protocol that I’m using. If you look in “IRLib.h” at about line 50 you will see the following enum definition.
enum IRTYPES {UNKNOWN, NEC, SONY, RC5, RC6,
PANASONIC_OLD, JVC, NECX, HASH_CODE,
LAST_PROTOCOL=HASH_CODE};
You can send that “RC5” is the third protocol. In my examples I will also be using protocol 5 which is “PANASONIC_OLD” which is the protocol used by my Scientific Atlantic SA 8300 HD cable box/DVR.
After typing in the protocol number, code, and number of bits in the serial monitor you should press enter or click on the “send” button. The Arduino should decode this information and send the proper signals from your IR LED. If you want to make sure that what you are typing is getting parsed you can uncomment the “Serial.print…” statements near the end of the sketch.
Here are the details on how the sketch works…
We start by including the IRLib.h file for the library. We create the sender object and create some integers to store the protocol number, code, and number of bits. The setup routine simply initializes the serial port.
The standard Serial objects include routines for parsing integers in decimal format coming across the serial line but it does not include parsing hexadecimal values so we’ve written a little routine called
long parseHex (void)
Which accepts characters “0” through “9” and “A” through “F” either upper or lower case and converts it into an integer value. We also have a routine called
void parseDelimiter ()
It skips over any commas, blanks or other extraneous characters which you use as a separator.
The main loop simply looks for serial characters available, parses them, and then sends them using the send method as follows
My_Sender.send(IRTYPES(protocol), code, bits);
Note that because the protocol is actually an enum rather than an integer we have to typecast it when passing it to the send method.
Of course it would be quite tedious to have to look up the protocol number, hex codes, and number of bits every time you wanted to send a function. So we’re going to write a program which will send that serial data from your PC to the Arduino. We will create a “virtual remote control” in which you can click on buttons on it will send that serial data to the Arduino which will in turn control your device.
In part 3b we will show you how to use a Python script to create just such a virtual remote and send the codes from your PC or laptop to the Arduino.